

Ki Kd Value
Change in output secondcelsius. The above process is known as manual tuning of PID.
Kp Ki And Kd Values For Experimental And Simulation Download Table

I defined the unknown parameters as symbolic and then obtain the numerical values with the vpasolve function.
Ki kd value. Each of the three parts have a constant coefficients Kp Ki and Kd. If it is not enabled save these settings in Configurationh. Kd Dissociation constant Ki is Inhibition constant and both are equally important.
The term Ki is used whenever this binding constant is measured through inhibition kinetics while Kd is preferred when the binding is measured more directly eg. Lastly set the Ki. After that in the PID Controller block in Simulink write Kp Ki Kd and N to the parameters repsectively.
Repeating previous answers IMHO the magnitude of the gains Kp Ki and Kd will depend on the characteristics of the process ie. Change in outputcelsius second. The system being controlled.
I found two definitions of Ki one describes the Ki value as the dissociation equilibrium constant of the enzyme-inhibitor complex which meant Ki would be the same as Kd. M301 P1956 I071 D13426 In the case of multiple extruders E0 E1 E2 these PID values are shared between the extruders although the extruders may be controlled separately. Importantly Ki values only accurately report a binding constant when the kinetic mechanism is correctly identified.
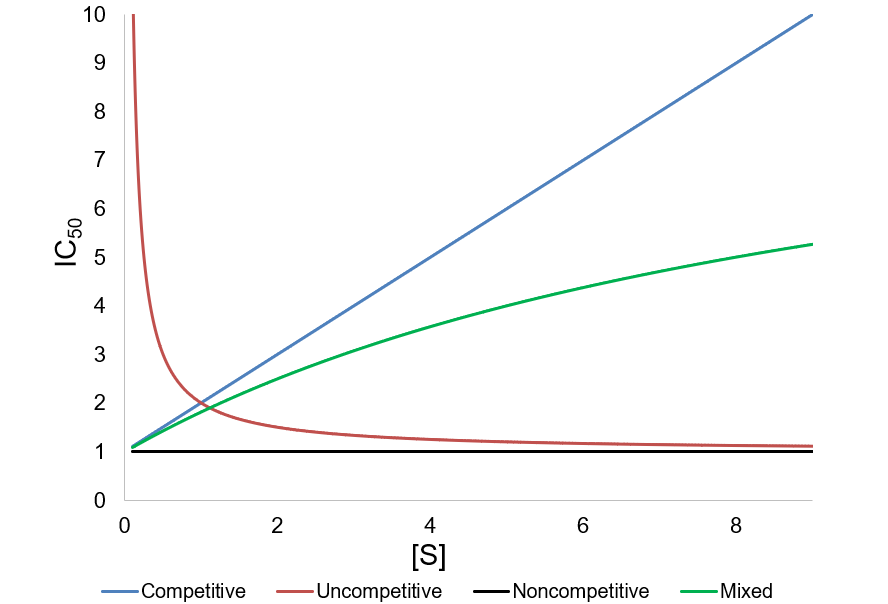
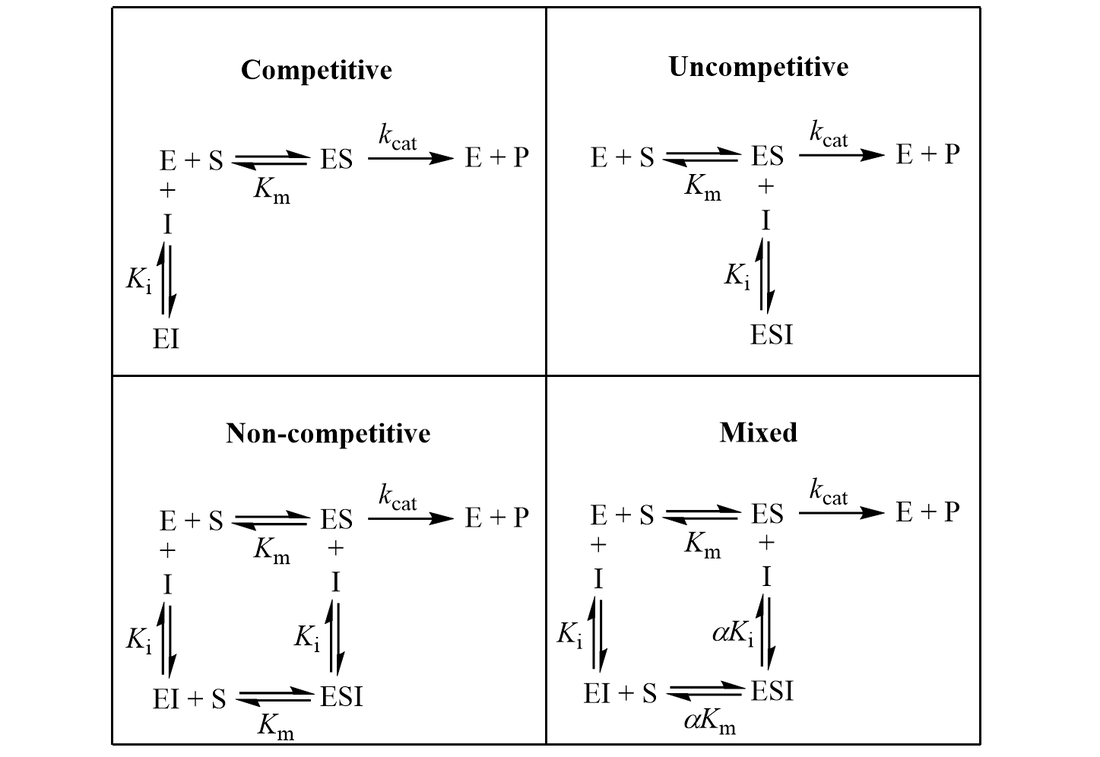
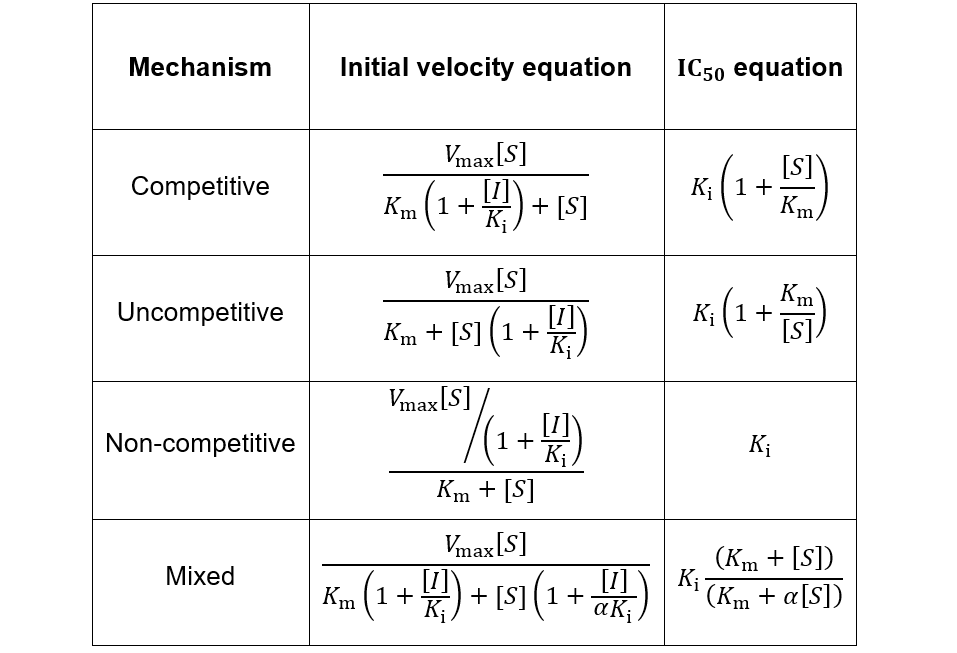
Of note for drugs that are noncompetitive inhibitors of CYP enzymes the Ki of a drug is essentially the same numerical value as the IC50s numerical value whereas for competitive and uncompetitive inhibition the Ki is about one-half that of the IC503 Therefore the smaller the Ki the smaller amount of medication needed in order to inhibit the activity of that enzyme. What I did is a simple equation solving. A good Kd value will lessen the oscillations until the robot is almost steady.
The Ki for the serotonin transporter is 15 001 nM while the Ki for the norepinephrine transporter is 940 27 nM Owens et al 1997. Note that at the end the symbolic controller parameters are replaced with their numerical values. The large difference between the measured K i values indicates a high specificity for the drug to inhibit the serotonin transporter in comparison to the norepinephrine transporter.
Take the location of the poles in the complex plane discretize this plane and each of the poles calculate the response and find the maximum and minimum values and the use of graphics on the complex plane creating a map of an outline a direct visual indication of the values of the poles are obtained from. Kp Ki Kd values to an PID controller. Set Ki Kp and Kd to 0.
As far as tuning goes it is similar to what Illegal Immigrant said. Also the right amount of Kd will keep the robot standing even if pushed. The K D value relates to the concentration of antibody the amount of antibody needed for a particular experiment and so the lower the K D value lower concentration and thus the higher the affinity of the antibody.
My normal temperature is around 25. For the bed use. If the EEPROM is enabled save with M500.
Added benefit of this code is that it allows you to choose what from controller you want by changing the return value. And here I take Input as Temperature. A PD controller would remove the iTerm from the return value.
The robot will oscillate when turned on even if the Kp and Kd are set but will stabilize in time. 4While on left of equation which is outout it is dimension less or percentage. By fluorescence quenching isothermal titration calorimetry or surface plasmon resonance.
I have calculated the transfer function for a DC motor and I want to use the arduino PID library to control that motor. So according to the PID algorithm temperature must be reduced to around 20. Below is my code.
A good overview of PID controllers with links for more specialized related issues such as those discussed below is in PID controller in Wikipedia. For one process the Kp Ki and Kd values might be one set value but when the process is changed to a different motor for example the set points might be different. Is there a way to use this transfer function to find out what my ideal Kp Ki and Kd values should be given the algorithm used in the PID library.
But still no change in temperature and my PWM is still 0. I just use default value like Kp 2 Ki 5 and Kd 1. The Kp Ki and Kd values can be entered with.
These constants are the tuning values and represent how much the process control relies on the P I and D. And now I set my setpoint 20. So the ideal PID values for our plant is Kp 200 Ki 300 and Kd 10.
Here is the matlab code used to simulate PID. Ki 0075KuTu so its units. Ki 12KuTu so its units.
In broad sense Ki values and analogous to EC50 or IC50 values depending upon the type of assaysrest is.
The Difference Between Ki Kd Ic50 And Ec50 Values The Science Snail
Pid
How Could I Find Kp Ki Kd From Transfer Function

How Could I Find Kp Ki Kd From Transfer Function

The Difference Between Ki Kd Ic50 And Ec50 Values The Science Snail
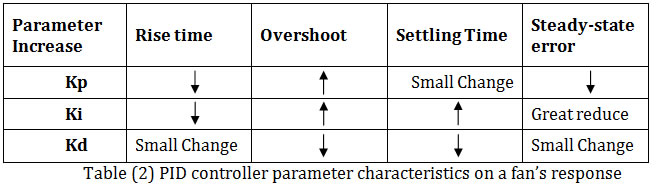
The Effect Of Increasing Each Of Controller Parameters Kp Ki And Kd Download Scientific Diagram

Self Balancing Robot Pid Control Polyengineer

The Difference Between Ki Kd Ic50 And Ec50 Values The Science Snail
The Difference Between Ki Kd Ic50 And Ec50 Values The Science Snail

Tidak ada komentar untuk "Ki Kd Value"
Posting Komentar